


 通过
通过 



量程:
Fx:0.5kg、1kg、2kg、3kg、5kg、10kg
Fy:0.5kg、1kg、2kg、3kg、5kg、10kg
Fz:1kg、2kg、4kg、6kg、10kg、20kg
〔三维力传感器的三轴之间最佳量程比率1:1:2〕
三维力传感器应用:
多维力传感器广泛应用于机器人手指、手爪研究;机器人外科手术研究;指力研究;牙齿研究;力反馈;刹车检测;精密装配、切削;复原研究;整形外科研究;产品测试;触觉反馈;示教学习。行业覆盖了机器人、汽车制造、自动化流水线装配、生物力学、航空航天、轻纺工业等领域。
三维力传感器结构类别:
三维力传感器能同时检测三维空间的三个力信息(Fx、Fy、Fz),通过它控制系统不但能检测和控制机器人手爪取物体的握力,而且还可以检测抓物体的重量,以及在抓取操作过程中是否有滑动、振动等。三维指力传感器有侧装和顶装式两种,侧装式三维力指力传感器一般用于二指的机器人夹持器,顶装式三维指力传感器一般用于机器人多指灵巧手。
三维力传感器技术参数
Rated Output 额定输出 1.0mV/V ±0.1%
Rated Output 额定输出 1.0mV/V ±0.1%
Zero Balance 零点平衡 ±1% of rated output
Creep after 30 minutes 蠕变 ±0.03% of rated output
Nonlinearity 非线性 ±1.0% of rated output
Repeatability 重复性 ±1.0% of rated output
Temp. effect on output 灵敏度温漂 ≤0.02% of applied output/oC
Temp. effect on zero 零点温漂 ≤0.02% of applied output/oC
Safe Temp. Range 可用温度范围 -10oC to + 70oC
Temp. Compensated 温度补偿范围 -10oC to + 40oC
Safe Overload 安全载荷 150%
Input Impedance 输入阻抗 387 ohm ± 20 ohm
Output Impedance 输出阻抗 350 ohm ± 5 ohm
Rated Excitation 推荐激励电压 10V DC/AC
Maximum Excitation 最大激励电压 15V DC/AC
Creep after 30 minutes 蠕变 ±0.03% of rated output
Nonlinearity 非线性 ±1.0% of rated output
Repeatability 重复性 ±1.0% of rated output
Temp. effect on output 灵敏度温漂 ≤0.02% of applied output/oC
Temp. effect on zero 零点温漂 ≤0.02% of applied output/oC
Safe Temp. Range 可用温度范围 -10oC to + 70oC
Temp. Compensated 温度补偿范围 -10oC to + 40oC
Safe Overload 安全载荷 150%
Input Impedance 输入阻抗 387 ohm ± 20 ohm
Output Impedance 输出阻抗 350 ohm ± 5 ohm
Rated Excitation 推荐激励电压 10V DC/AC
Maximum Excitation 最大激励电压 15V DC/AC
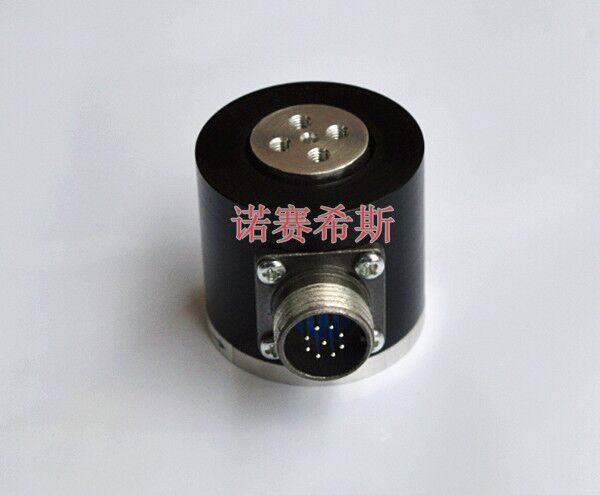
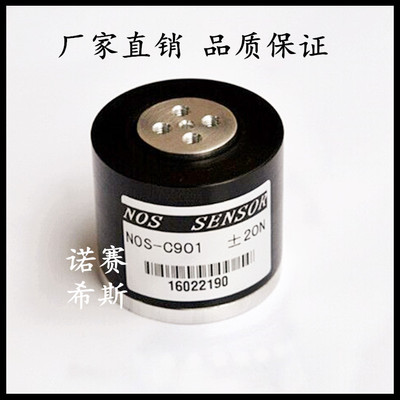
实物拍摄: