


 通过
通过 



量程:
1t 2t 3t 5t 10T 20t 30t 50t 100t
主要特点:
量程:Fx:5kg 10kg 20kg 50kg 100kg 200kg、、、、、20t(可定制)
Fy:5kg 10kg 20kg 50kg 100kg 200kg、、、、、20t(可定制)
Fz:5kg 10kg 20kg 50kg 100kg 200kg、、、、、50t(可定制)
精度:Fx=Fy=Fz=0.3%F.S
综合精度≤2%
输出灵敏度:1.0±0.5mV/V
供桥电压:12VDC
绝缘电阻≥5000MΩ
使用温度:-20~70℃
外形:
可以根据客户制定的要求定做和尺寸及其他的要求
六维力传感器应用:
六维力传感器是一种能够同时测量两个方向以上力及力矩分量的力传感器,广泛应用于机器人手指、手爪研究;机器人外科手术研究;指力研究;牙齿研究;力反馈;刹车检测;精密装配、切削;复原研究;整形外科研究;产品测试;触觉反馈;示教学习。行业覆盖了机器人、汽车制造、自动化流水线装配、生物力学、航空航天、轻纺工业等领域。
六维力传感器结构类别:
六维力传感器能同时检测三维空间的三个力信息(Fx、Fy、Fz),通过它控制系统不但能检测和控制机器人手爪取物体的握力,而且还可以检测抓物体的重量,以及在抓取操作过程中是否有滑动、振动等。三维指力传感器有侧装和顶装式两种,侧装式三维力指力传感器一般用于二指的机器人夹持器,顶装式三维指力传感器一般用于机器人多指灵巧手。
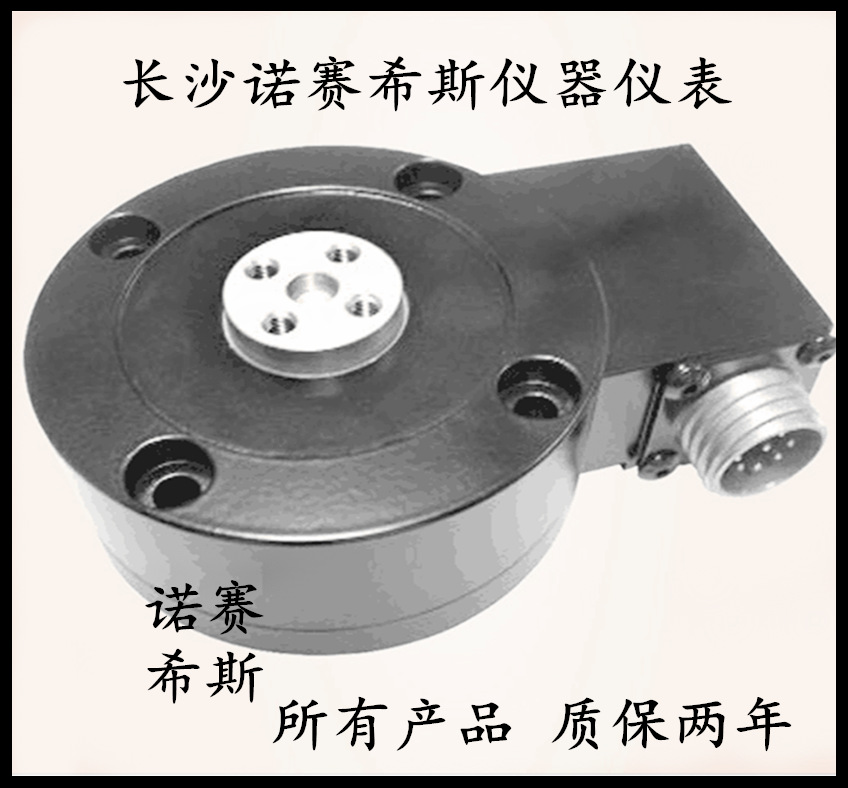
六维力传感器实物拍摄:
六维力传感器安装案例: